| GPS动态定位 |
| 作者:管理员 来源:新瑞测绘 浏览:2250次 更新:2013/4/26 9:00:20 |
GPS动态定位概述 什么是GPS动态定位
GPS动态定位的应用
GPS动态定位的特点
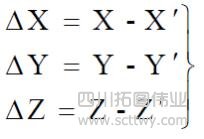
GPS动态定位的类型 (1)单点动态定位(动态绝对定位) (2)实时差分动态定位法: ①位置差分 ②伪距差分 ③相位平滑伪距差分:载波多普勒计数平滑伪距、载波相位平滑伪距 ④载波相位差分:修正法、求差法 GPS动态定位的基本原理 单点伪距动态定位(动态绝对定位) GPS绝对定位主要是以GPS卫星和用户接收机天线之间的距离为基本观测量,并利用已知的卫星瞬时坐标来确定接收机天线对应的点位在协议地球坐标系中的位置。 动 态绝对定位是确定处于运动载体上的接收机在运动的每一瞬间的位置。由于接收机天线处于运动状态,故天线点位的坐标是一个变化的量,因此确定每一瞬间坐标的 观测方程只有较少的多余观测(甚至没有多余观测),且一般常利用测距码伪距进行动态绝对定位。因此,其精度较低,一般仅有几十米的精度,在SA政策影响 下,其精度甚至低于百米。通常这种定位方法只用于精度要求不高的飞机、船舶以及陆地车辆等运动载体的导航。 位置差分原理 位 置差分GPS是一种最简单的差分方法。安置在已知点基准站上的GPS接收机,经过对4颗及4颗以上的卫星观测,便可实现定位。先求出基准站的坐标(X′ ,Y′,Z′),由于存在着卫星星历、时钟误差、大气折射等误差的影响,该坐标与已知基准站坐标(X,Y,Z)不一样,存在误差。即:
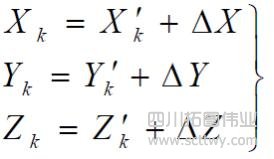
式中:ΔX、ΔY、ΔZ为坐标改正数,基准站利用数据链将坐标改正数发送给用户站。 用户站用接收到的坐标改正数对其坐标进行改正:
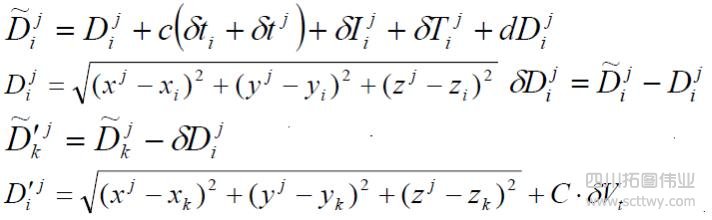
经过坐标改正后的用户坐标已消去了基准站与用户站的共同误差,如卫星星历误差、大气折射误差、卫星钟差、SA政策影响等,提高了定位的精度。 位置差分的优点是需要传输的差分改正数较少,计算方法较简单,任何一种GPS接收机均可改装成这种差分系统。其缺点主要为: (1)要求基准站与用户站必须保持观测同一组卫星,由于基准站与用户站接收机配备的不完全相同,且两站观测环境也不完全相同,因此难以保证两站观测同一组卫星,并会导致定位所产生的误差可能会不很匹配,从而影响定位精度。 (2)位置差分定位效果不如伪距差分好。 伪距差分原理 伪 距差分是目前应用最广泛的一种差分定位技术之一。该定位技术通过在基准站上利用已知坐标求出测站至卫星的距离,并将其与含有误差的测量距离比较,然后利用 一个α-β滤波器将此差值滤波并求出其偏差,并将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距求出自 身的坐标。如果基准站、用户站均观测了相同的4颗或4颗以上的卫星,即可实现用户站的定位。 其定位基本公式如下:
由于伪距差分可提供单颗卫星的距离改正数δDi,因此用户站可选其中任意4颗相同卫星的伪距改正数进行改正,而不必要求两站观测的卫星完全相同,且伪距改正数是直接在WGS-84坐标系上进行的,是一种直接改正数,不必先变换为当地坐标,定位精度更高,且使用更方便。 由 于伪距差分定位依赖于两站公共误差的抵消来提高定位精度,误差抵消的程度决定了精度的高低。而误差的公共性在很大程度依赖于两站距离,随着两站距离的增 加,其误差公共性逐渐减弱,例如对流层、电离层误差。因此用户和基准站之间的距离对精度有着决定性的影响,用户站离基准站的距离越大,伪距差分后的剩余误 差越大,定位精度越低。 相位平滑伪距差分原理 伪距差分实际上是在测站之间求伪距观测值的一次差,因而消除了两伪距观测值中所含有的共同的系统误差,但是却无法消除伪距观测值中所含有的随机误差,从而限制了伪距差分定位的精度。 载波相位测量的精度较测距码伪距测量的精度高2个数量级,如果能用载波相位观测值对伪距观测值进行修正,就可提高伪距定位的精度,但是载波相位整周数无法直接测得,因而难以直接利用载波观测值。 相位平滑伪距差分原理 虽然整周数无法获得,但可由多普勒频率计数获得载波相位的变化信息,即可获得伪距变化率的信息,可利用这一信息来辅助伪距差分定位,称为载波多普勒计数平滑伪距差分; 另外,在同一颗卫星的两历元间求差,可消除整周未知数,可利用历元间的相位差观测值对伪距进行修正,即所谓的相位平滑伪距差分。 载波相位差分原理 载 波相位差分GPS定位与伪距差分GPS原理相类似,其基本思想是:在基准站上安置一台GPS接收机,对卫星进行连续观测,并通过无线电传输设备实时地将观 测数据及站坐标信息传送给用户站;用户站一方面通过接收机接收GPS卫星信号,同时还通过无线电接收设备接收基准站传送的观测数据,然后根据相对定位原 理,实时地处理数据,并能实时地以厘米级的精度给出用户站的三维坐标。 载波相位差分GPS有两种定位方法,一种与伪距差分相同,基准站将载波相位的修正量发送给用户站,以对用户站的载波相位进行改正实现定位,该方法称为修正法。 另一种是将基准站的载波相位发送给用户站,并由用户站将观测值求差进行坐标解算,这种方法称为求差法。 整周未知数的动态求解
载波相位实时动态差分技术 RTK(Real Time Kinematic)GPS技术实时差分动态(Real Time Kinematic——RTK)测量系统,是GPS测量技术与数据传输技术相结合而构成的组合系统。它是GPS测量技术发展中的一个新的突破。RTK 测量技术,是以载波相位观测量为根据的实时差分GPS测量技术。RTK 测量技术是准动态测量技术与AROTF算法和数据传输技术相结合而产生的,它完全可以达到“精度、速度、实时、可用”等各方面的要求。 RTK – Real Time Kinametic(实时动态差分)
广域差分GPS技术
什么是差分GPS(DGPS – Differential GPS) 基本思路:利用设于坐标已知的参考站,计算各类改正数。 影响GPS测量定位的误差。 误差的特性
DGPS
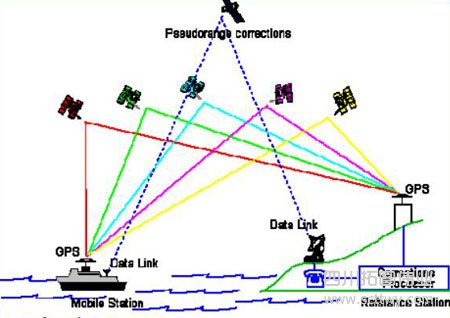
差分GPS系统的构成
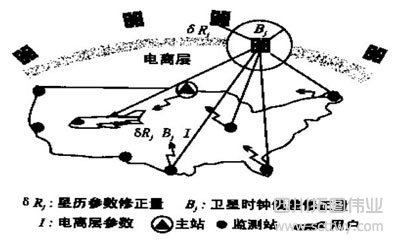
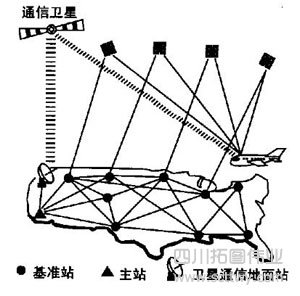
局域差分与广域差分差分 局域差分 局域差分GPS(LADGPS – Local Area DGPS) 基准站作用距离:数百公里。 特点:用户根据多个基准站所提供的改正信息经平差计算后求的用户站定位改正数。 广域差分GPS(WADGPS –Wide Area DGPS) 基准站作用距离:数千公里。 特点:
增强型的差分GPS系统
|
|
上一个:流动站的设置要求 下一个:CORS系统基站数据进行控制点长基线解算的问题 |
 返回列表 | 返回列表 | |